UnrealHaptics
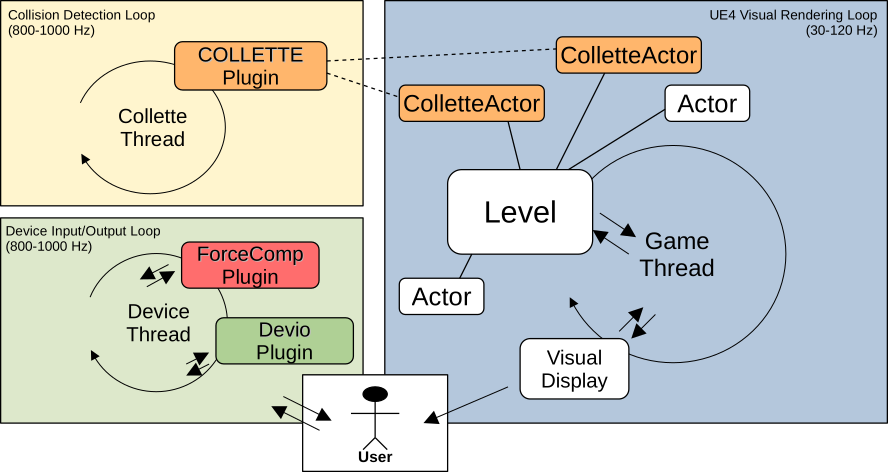
UnrealHaptics is a plugin-architecture that enables advanced virtual reality (VR) interactions, such as haptics or grasping in modern game engines. The core is a combination of a state-of-the-art collision detection library with support for very fast and stable force and torque computations and a general device plugin for communication with different input/output hardware devices, such as haptic devices or Cybergloves. Our modular and lightweight architecture makes it easy for other researchers to adapt our plugins to their requirements. We prove the versatility of our plugin architecture by providing two use cases implemented in the Unreal Engine 4 (UE4). In the first use case, we have tested our plugin with a haptic device in different test scenes. For the second use case, we show a virtual hand grasping an object with precise collision detection and handling multiple contacts. We have evaluated the performance in our use cases. The results show that our plugin easily meets the requirements of stable force rendering at 1 kHz for haptic rendering even in highly non-convex scenes, and it can handle the complex contact scenarios of virtual grasping.
Git Repositories
- UE5 Project using the Collette, ForceComp, Haptico: UnrealHapticsExample
- Collision Detection: Collette
- Force Computation: ForceComp
- Haptic Communication: Haptico
Demo (Windows) (2023)
-
Tested with Novint Falcon:
[Demo]
Demo (Windows) (2021):
- Cone and Bunny scene should be displayed
- Cone is controlled with the phantom
-
Touching the bunny results in haptic feedback
[Demo] -
UnrealHaptics source snapshot. Project needs Unreal Engine 4.18
[Project_Snapshot]
Publications
- Frontiers in Virtual Reality, Technologies for VR, 16. April 2021.
License
This original work is copyright by University of Bremen.
Any software of this work is covered by the European Union Public Licence v1.2.
To view a copy of this license, visit
eur-lex.europa.eu.
Any other assets (3D models, movies, documents, depth-image recordings etc.) are covered by the
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
To view a copy of this license, visit
creativecommons.org.
If you use any of the assets or software to produce a publication,
then you must give credit and put a reference in your publication.
If you would like to use our software in proprietary software,
you can obtain an exception from the above license (aka. dual licensing).
Please contact zach at cs.uni-bremen dot de.