OPA3L
The "OPtimal Assistierte, hoch Automatisierte, Autonome und kooperative Fahrzeugnavigation und Lokalisation" (OPA3L) project is a research project between 03/01/2019 and 05/31/2023 and sucessor of the AO-Car research project. It is about automated driving and cooperated maneuvers in recurrent drives in known areas, funded by "Deutsches Zentrum für Luft- und Raumfahrt e. V. (DLR) in Bonn and Bundesministerium für Wirtschaft und Energie (BMWi). Within 4 years time the car shall be able to drive autonomously in a district of Bremen, Germany and park itself.
Out task's were surface reconstruction based on LiDAR pointclouds and remote driving as backup solution for autonomous driving. On the car runs 'The Automotive Data and Time-Triggered Framework' (ADTF) 3, which collects all sensor information, streams them to a remote operator, awaits steering data and after validating forwards them to the actuators.
Images
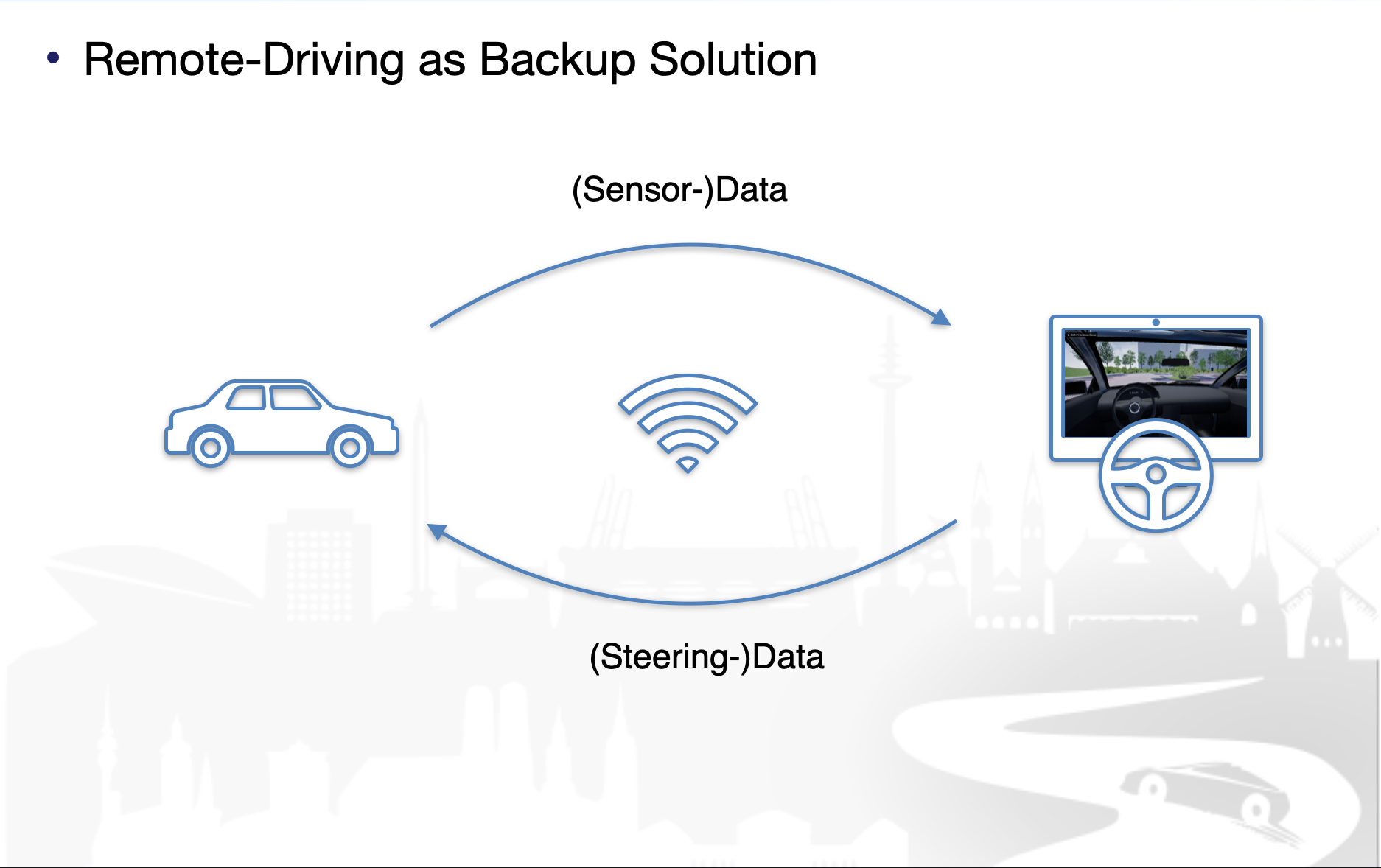
Remote Driving as backup solution. Sensor data will be transfered wireless to remote operator and steering data gets back.
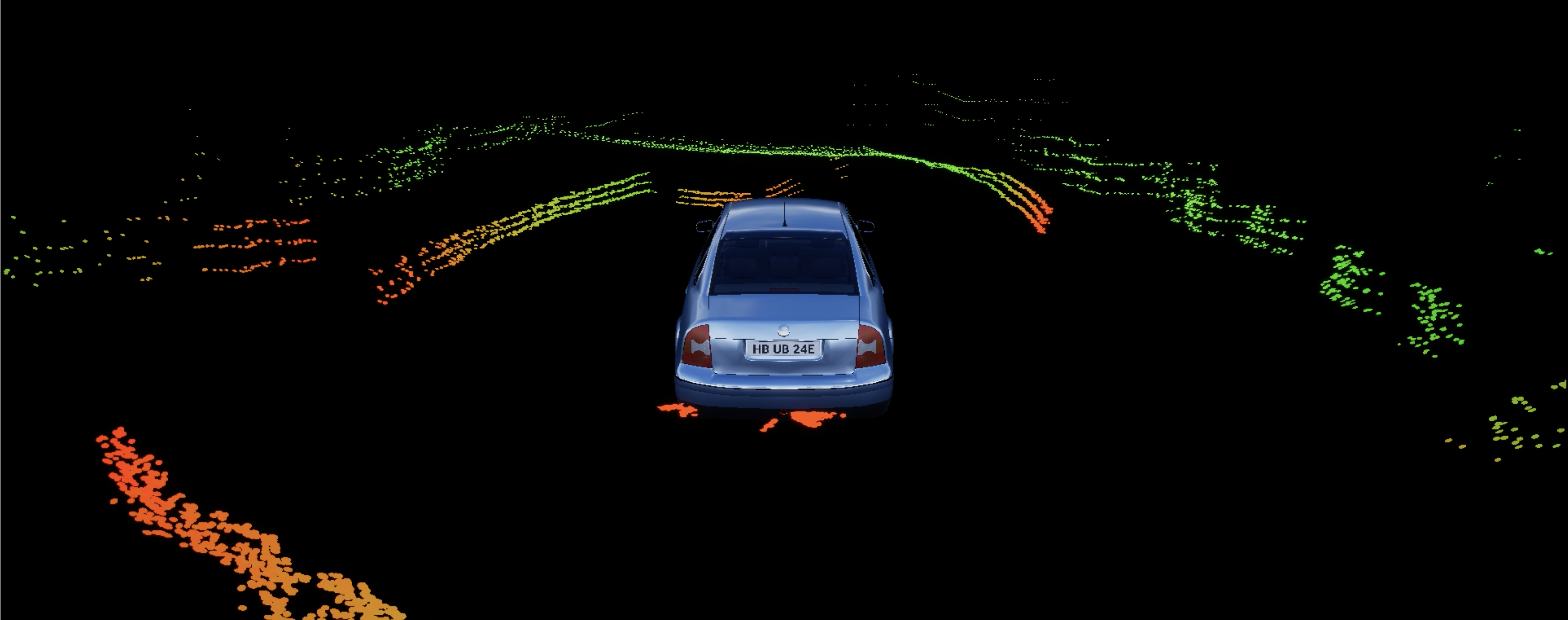
Pointcloud of the 6 LiDARs. Distance is color-coded from red (close) to green (far).
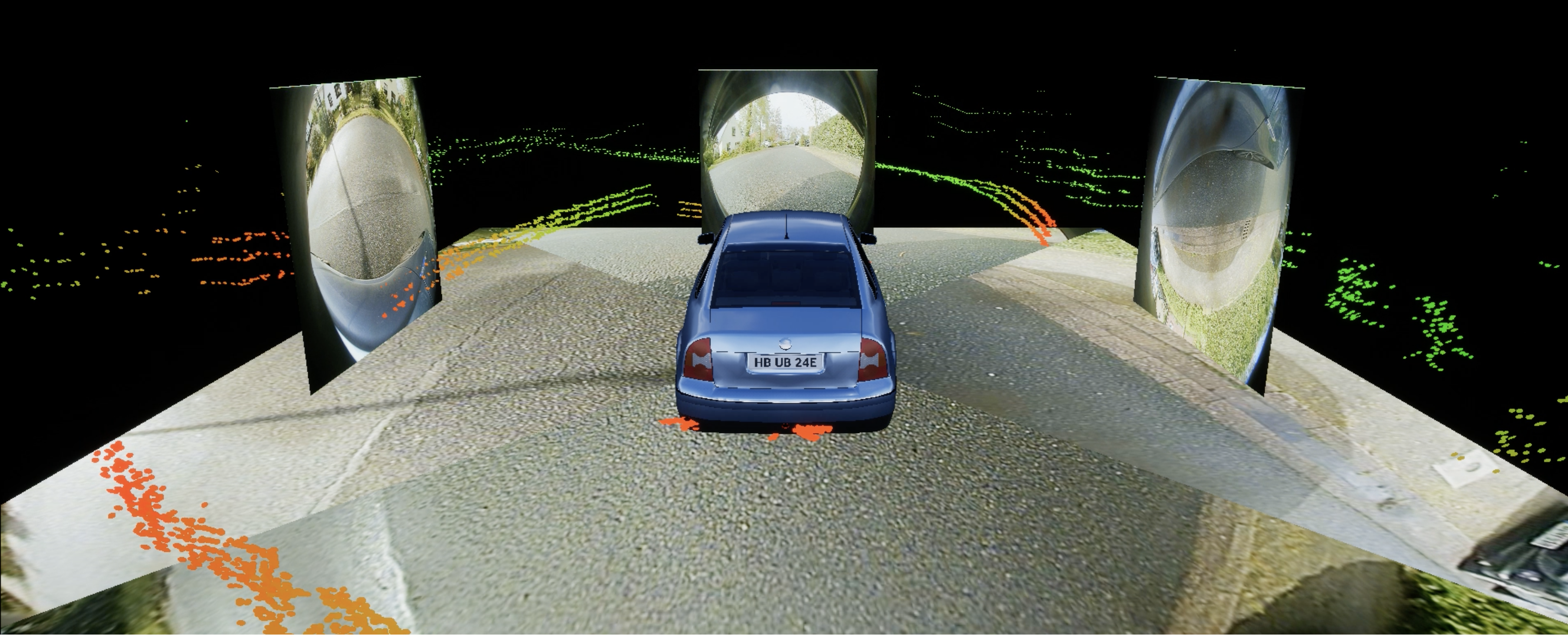
Pointclouds and area view cameras mapped to planes