Recreating the Valles Marineris
This thesis addresses the creation of a realistic Mars terrain in Unreal Engine 4, consisting of a landscape, different textures and 3D models for bigger stones and clutter created with a variety of suitable software. It aims to complement the VaMEx-VTB project by providing a useful terrain for testing out robot navigation driven by the visual SLAM algorithm.
Description
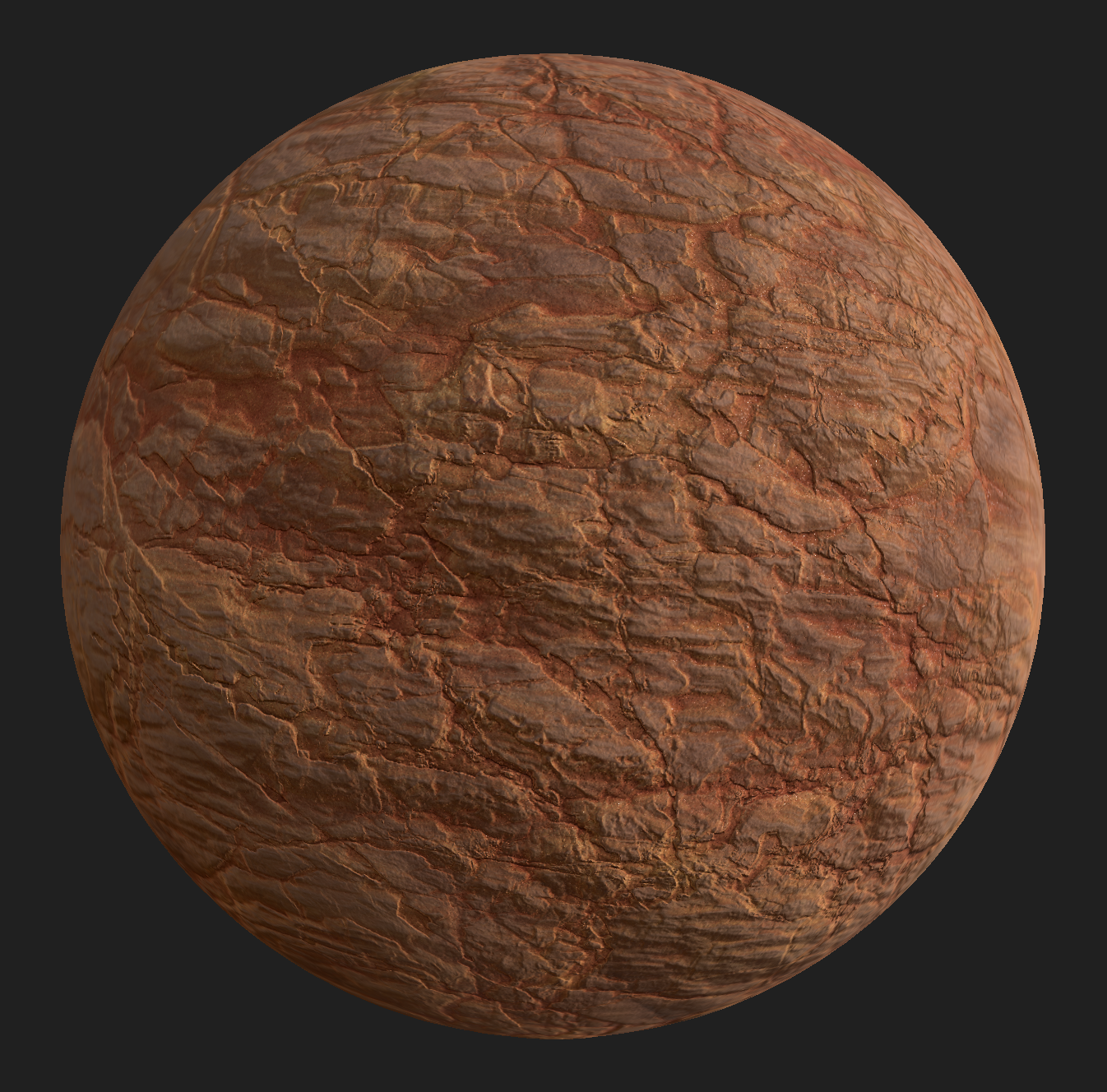
First, four procedurally generated textures were created using Substance Designer, which were used for texturing the terrain in Unreal Engine 4 and for texturing the models.
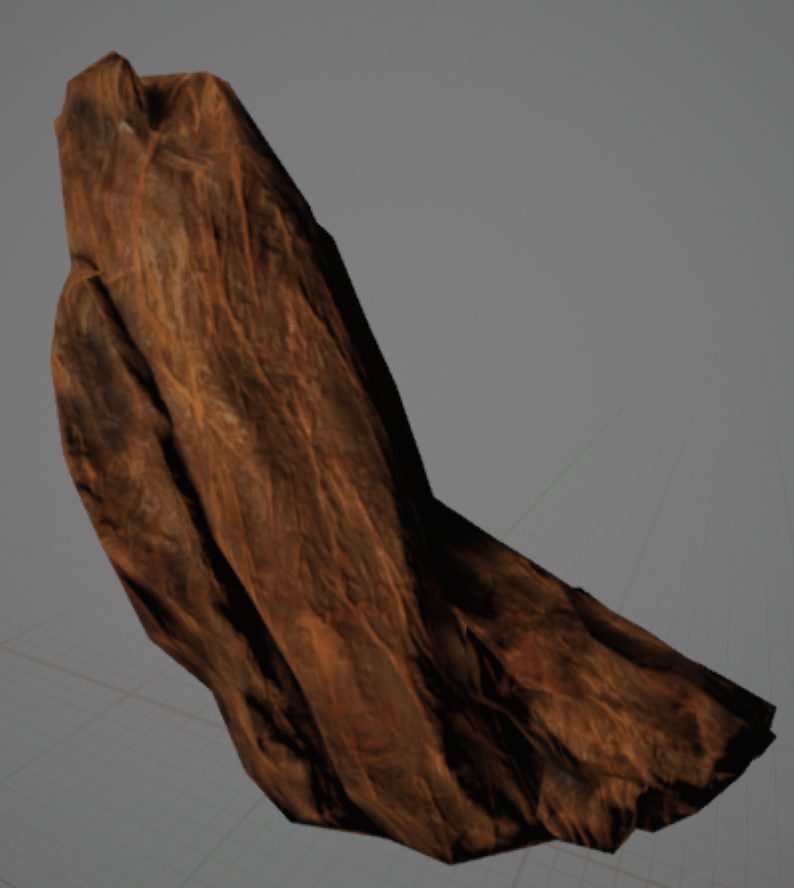
Two rock models and two models of rock formations were sculpted in Mudbox and 3DCoat, their polygon count was reduced in MeshLab and their meshes were unwrapped and normals were baked out in Maya. The texturing of the models was done using the method of texture painting in Mudbox, rendering additional texture maps in CrazyBump and refining the textures in Photoshop, resulting in two individual texture sets for each model.
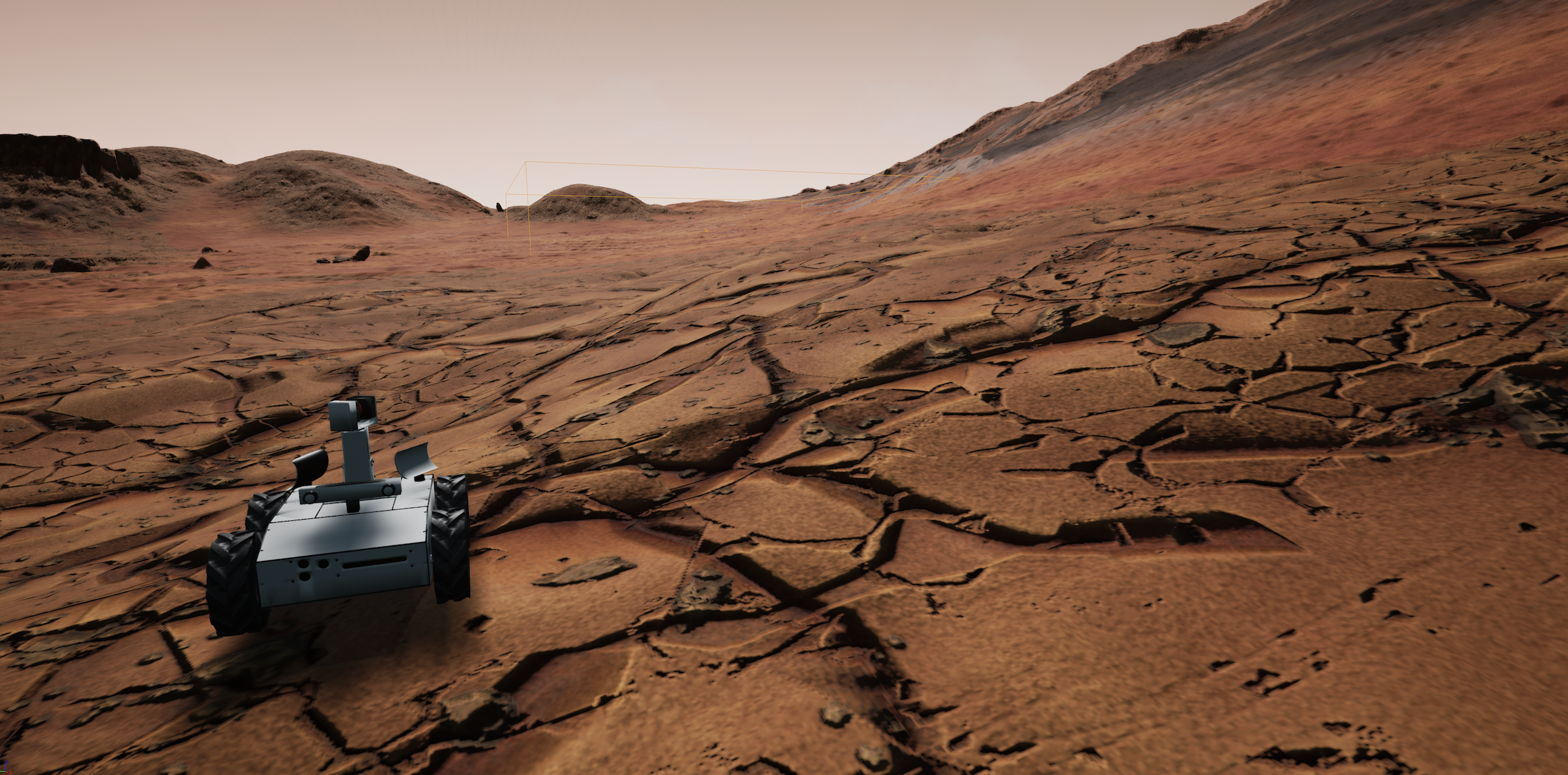
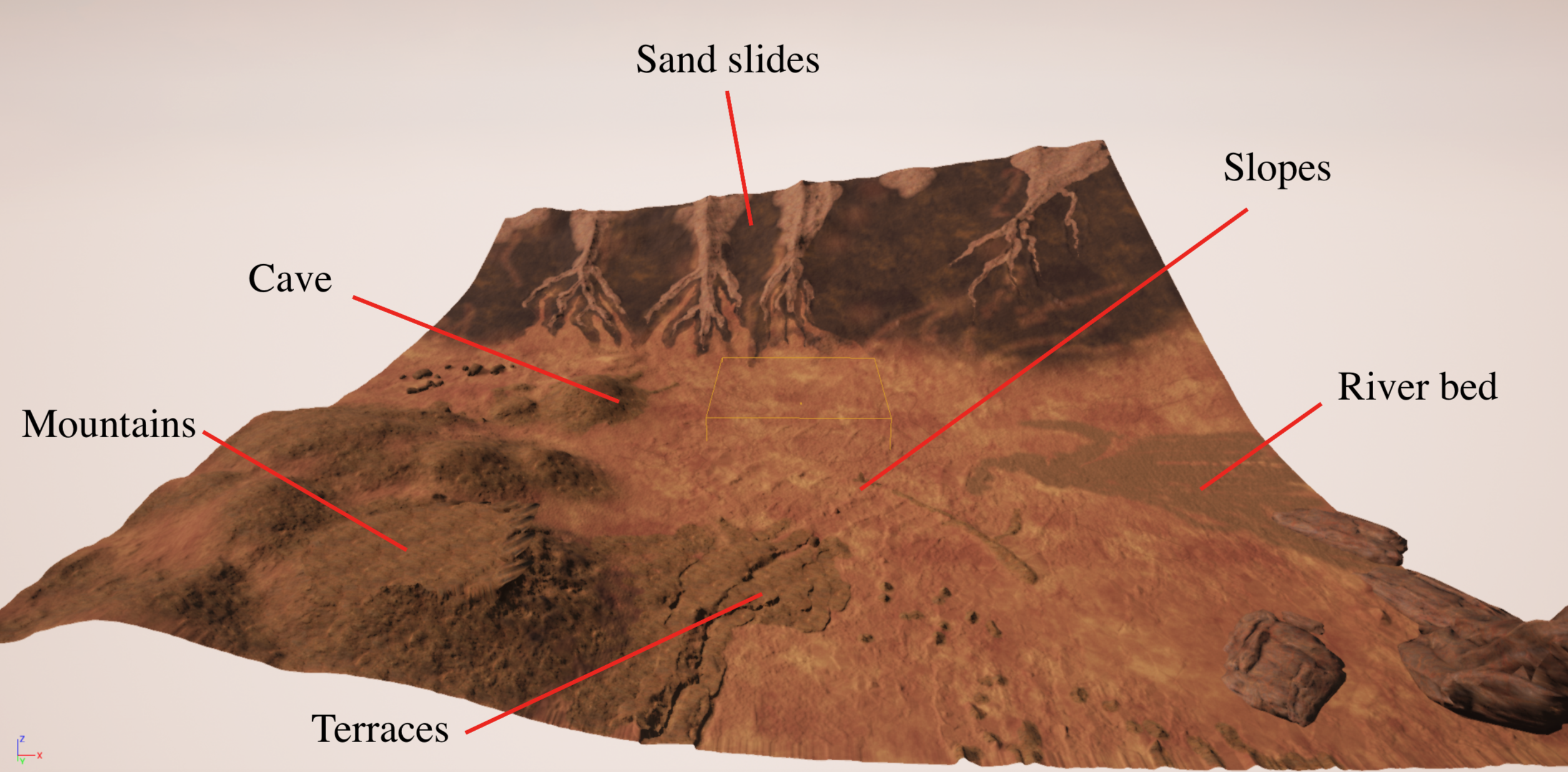
To complement these models, small rocks were created using Maya's shatter tool. The Mars terrain was put together in Unreal Engine 4 and was created by importing a heightmap which displays a real part of the Valles Marineris on Mars. On this landscape, the previously created textures were painted on and the textured models were placed in various locations to form different environmental sections. Because this terrain should complement the robots' navigation, tests of the VSLAM's performance were run on the final terrain to determine to whether a feature-enriched terrain would improve the algorithm's performance.

Results
The final result is a Mars terrain in Unreal Engine 4 which is serves the purpose of complementing the VaMEx-VTB. It portaits a section of the Valles Marineris measuring 2km x 2km and has multiple section, such as cliff overhangs, slopes and a cave where the robots contained in the VTB can be tested out. The created materials are widely re-usable and can be adjusted to a variety of different terrains by changing parameters such as color or roghness from inside 3D applications. The sculpted models have a very low polycount and can therefore be instanced multiple times in one project. This theses also contains a tool chain for 3D modeling and creating environmental art, which can be used as a refernce for similar tasks.
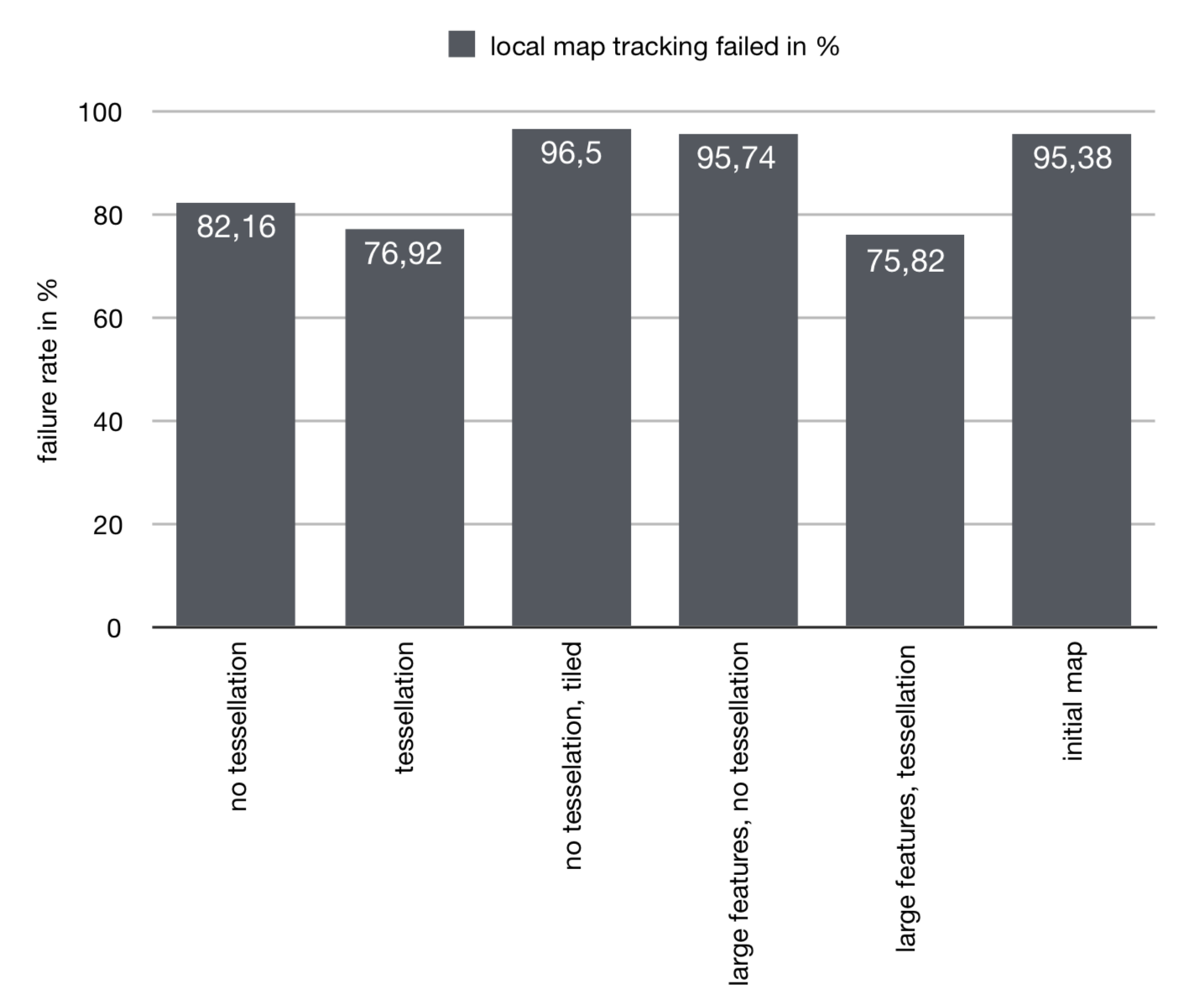
Because tests run with the VSLAM algorithm implemented in the VTB didn't show any improvement in the new terrain compared to the old, featuresless terrain, which it should have, it could be concluded the the implementation of the VSLAM was not working correctly and needed improvement. Problems with Unreal Engine's pathfinding algorithm and the inabilty of Mars rover models to operate off-road was also discovered during these tests.
Files
Full version of the bachelor's thesis (English only)
License
This original work is copyright by University of Bremen.
Any software of this work is covered by the European Union Public Licence v1.2.
To view a copy of this license, visit
eur-lex.europa.eu.
The Thesis provided above (as PDF file) is licensed under Attribution-NonCommercial-NoDerivatives 4.0 International![]()
![]()
![]()
![]() .
.
Any other assets (3D models, movies, documents, etc.) are covered by the
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
To view a copy of this license, visit
creativecommons.org.
If you use any of the assets or software to produce a publication,
then you must give credit and put a reference in your publication.
If you would like to use our software in proprietary software,
you can obtain an exception from the above license (aka. dual licensing).
Please contact zach at cs.uni-bremen dot de.