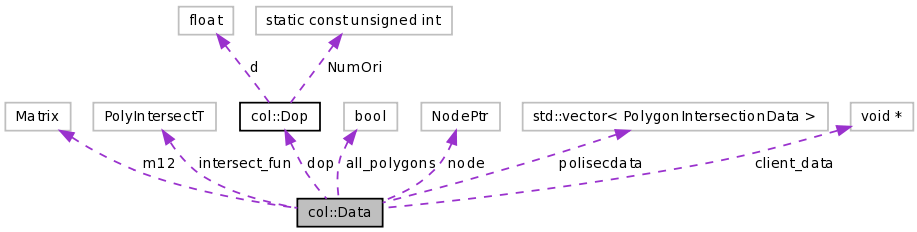
Collaboration diagram for col::Data:
Public Member Functions | |
| Data (const osg::NodePtr &node1, const osg::NodePtr &node2) | |
| Construct a struct for passing data down to individual polygon checks. | |
| void | addPolygonIntersectionData (const osg::Pnt3f *points1, const osg::Pnt3f *points2, const unsigned int *pgon1, const unsigned int *pgon2, unsigned int nvertices1, unsigned int nvertices2, const osg::GeometryPtr &geom1, const osg::GeometryPtr &geom2, unsigned int pgon_index1, unsigned int pgon_index2) |
| Fill polisecdata. | |
Public Attributes | |
| std::vector< PolygonIntersectionData > | polisecdata |
| osg::NodePtr | node [2] |
| Pointers to the two geometries being checked. | |
| osg::Matrix | m12 |
| Transformation from geom[0] into geom[1]'s frame. | |
| bool | all_polygons |
| void * | client_data |
| client data | |
| PolyIntersectT | intersect_fun |
| The function for checking a pair of polygons, NULL = built-in. | |
| const Dop * | dop [2] |
| Only for debugging; DOPs of leaves in geom[1]'s coord system. | |
Protected Member Functions | |
| Data (const Data &source) | |
| Data & | operator= (const Data &source) |
This struct is used to pass data to collision callbacks.
It is also used internally to pass data around within the collision pipeline and recursive collision detection algos.
| col::Data::Data | ( | const osg::NodePtr & | node1, | |
| const osg::NodePtr & | node2 | |||
| ) |
Construct a struct for passing data down to individual polygon checks.
| node1,node2 | the two geometries to be checked for collision |
| XCollision | If a geom does not have a positions array. |
 1.5.2
1.5.2