

VaMEx-VTB is a sub-project of the project line VaMEx funded by DLR (Deutsches Zentrum für Luft- und Raumfahrt/German Aerospace Centre) and VaMEx-VTB sub-project is developed by the University of Bremen (Institute for Computer Graphics and Virtual Reality).
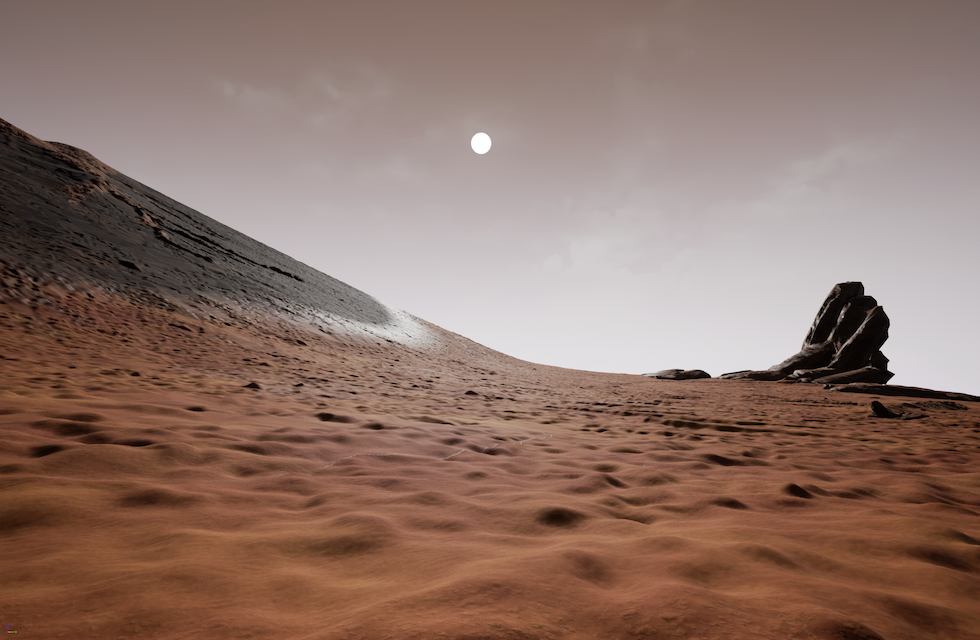
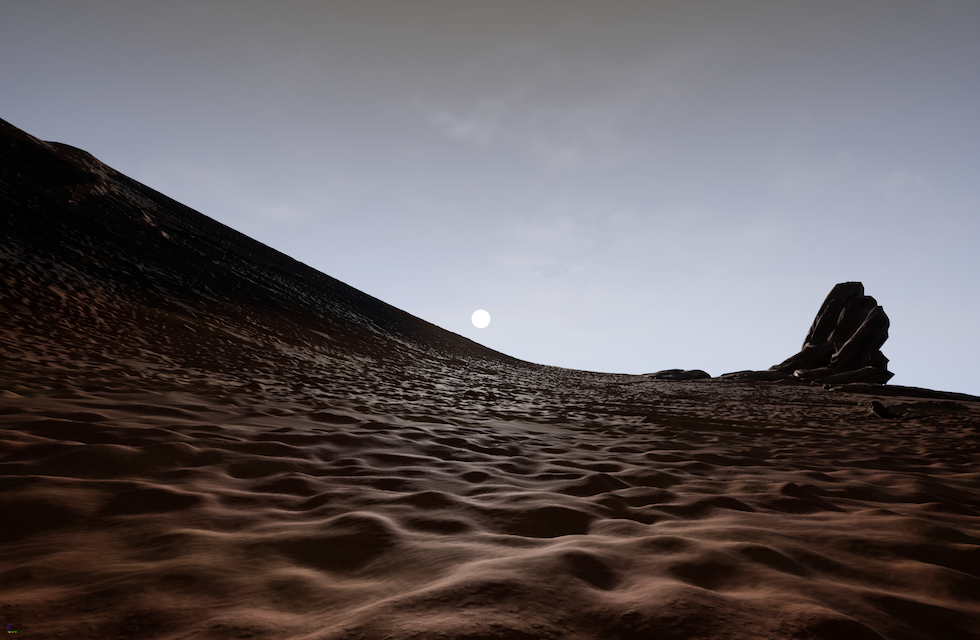
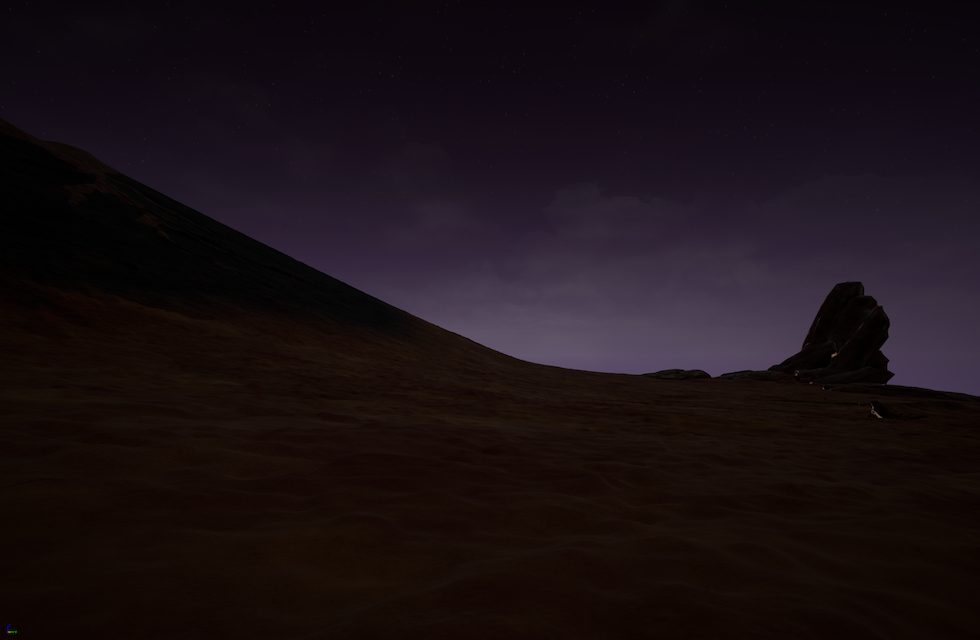
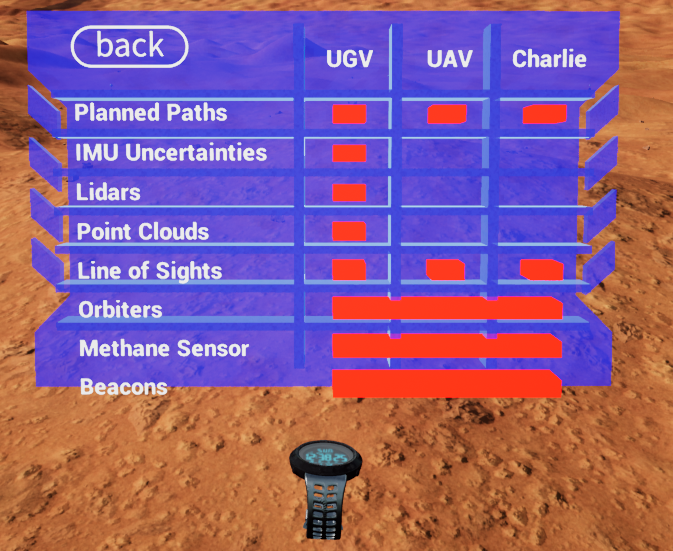
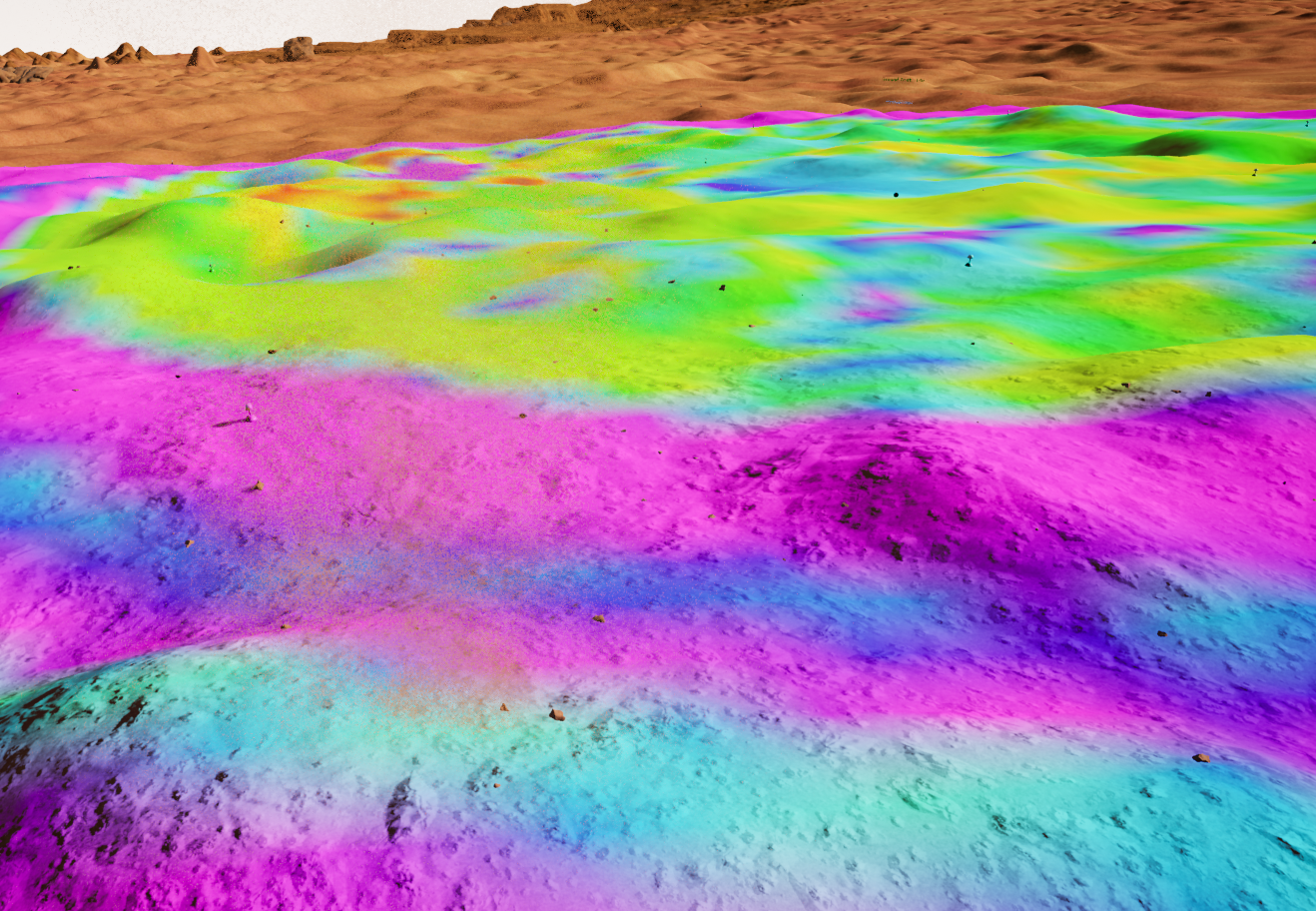
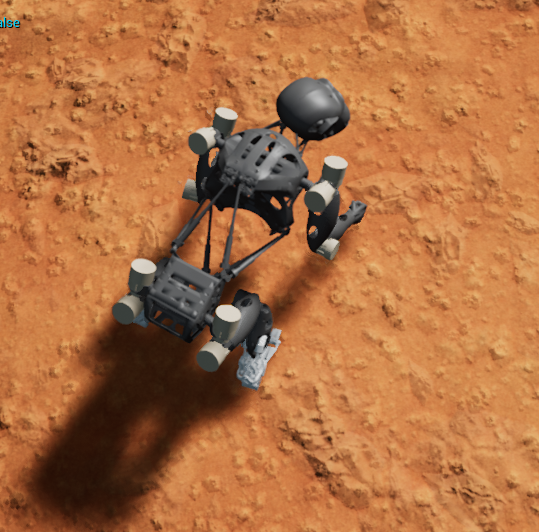
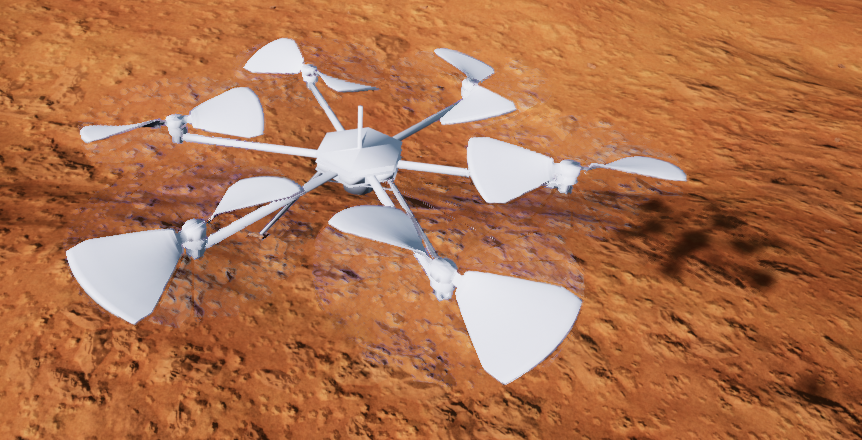
VaMEx project line is an initiative for the development of concepts, algorithms, and hardware for a swarm-based exploration of the Valles Marineris on the planet Mars. The swarm comprises different elements such as rovers, UAVs (Unmanned Aerial Vehicles (drones)), and hominid robots (called Charlie). The idea is to have an autonomous swarm navigation and exploration system which communicate with each other. Real physical tests for the validation and verification of such complex autonomous navigation and exploration systems are time-consuming, expensive and difficult due to the requirement of implementation of advanced hardware and to find or build a suitable environment for the validation. Therefore, testing in a virtual environment and framework overcomes all of the above shortcomings and provides several other benefits. VaMEx-VTB is one such platform which provides a simulation framework for testing the swarm behavior on the Mars terrain.
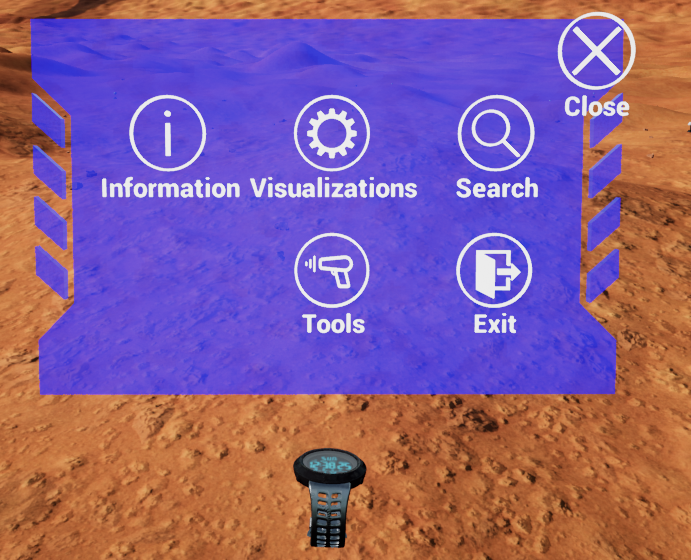
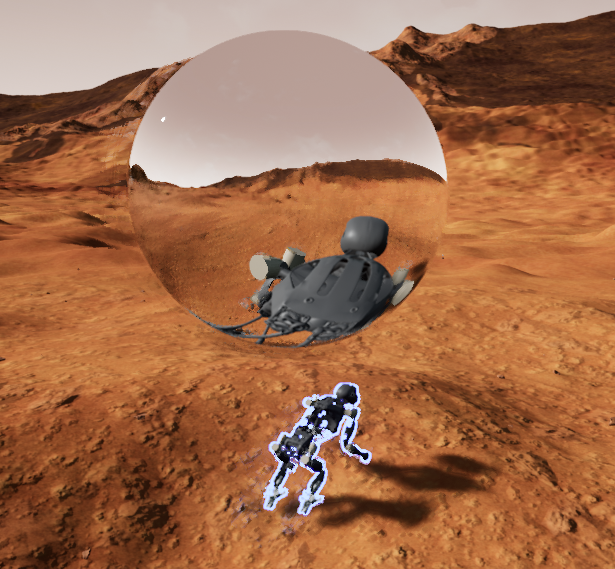
To experience the Valles Marineris, users can choose between using the application via desktop, power wall, or with a head-mounted display (HMD) for better immersion. Through a multiplayer mode, users are able to share their experiences and encounters. An alien-like companion, which was handmade with Blender, helps the user by answering questions about the environment, the different models and more. To move around the Valles Marineris teleportation is used.
For the project's organization, a modified version of SCRUM is used. Every sprint starts with the planning of the sprint. During the sprint, all team members meet on Mondays, Wednesdays, and Fridays. This so-called “Scrum meeting” replaced the Daily Scrums. In this meeting, the members are updated about the process, ideas, and problems in all subjects. On Tuesdays, a status meeting with the product owners (Gabriel Zachmann, Rene Weller) was scheduled (Scrum Review). Due to Covid-19, all meetings are held via Zoom and Discord. Every two to three weeks a Demo replaces the Scrum Review to get detailed feedback from the product owners.
To organize the different versions of the Unreal Engine project we used GitLab and the function of different branches for each team member which are merged with the main branch after one or more tasks were successfully implemented. To prevent merge conflicts we used one branch for multiple issues during one sprint. To have an overview of the project tasks the issues system of GitLab is used to mark tasks as open, closed, in progress, and testing.













Marc Jochens
B.Sc. Informatik
Christopher Wolff
B.Sc. Informatik
Dirk Hartlage
B.Sc. Informatik
Julian Mehwald-Hoffmann
B.Sc. Digitale Medien
Haya Al Maree
B.Sc. Digitale Medien
Lukas Gossé
B.Sc. Digitale Medien
Carlotta Herrmann
B.Sc. Digitale Medien
Alexander Klier
B.Sc. Digitale Medien
Kai Gätjen
B.Sc. Digitale Medien
Prof. Dr.-Ing. Gabriel Zachmann
Dr. René Weller
Kevin Marnholz
This original work is copyright by University of Bremen.
Any software of this work is covered by the European Union Public Licence v1.2.
To view a copy of this license, visit
eur-lex.europa.eu.
The Thesis provided above (as PDF file) is licensed under Attribution-NonCommercial-NoDerivatives 4.0 International![]()
![]()
![]()
![]() .
.
Any other assets (3D models, movies, documents, etc.) are covered by the
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
To view a copy of this license, visit
creativecommons.org.
If you use any of the assets or software to produce a publication,
then you must give credit and put a reference in your publication.
If you would like to use our software in proprietary software,
you can obtain an exception from the above license (aka. dual licensing).
Please contact zach at cs.uni-bremen dot de.