Comparison between VR vs Reality
Grasping is probably one of the most common interactions in VR ranging from games to even many
societal and clinical applications. Our aim in the comparison team was to conduct a
study/experiment to see how grasping in VR differs with and without haptic feedback and does it
even come close to real life grasping.
To conduct properly our comparison, some preliminaries like environment, specific equipment, an
experiment protocol and participants were necessary in order to observe grasping in both the
real and the virtual world.
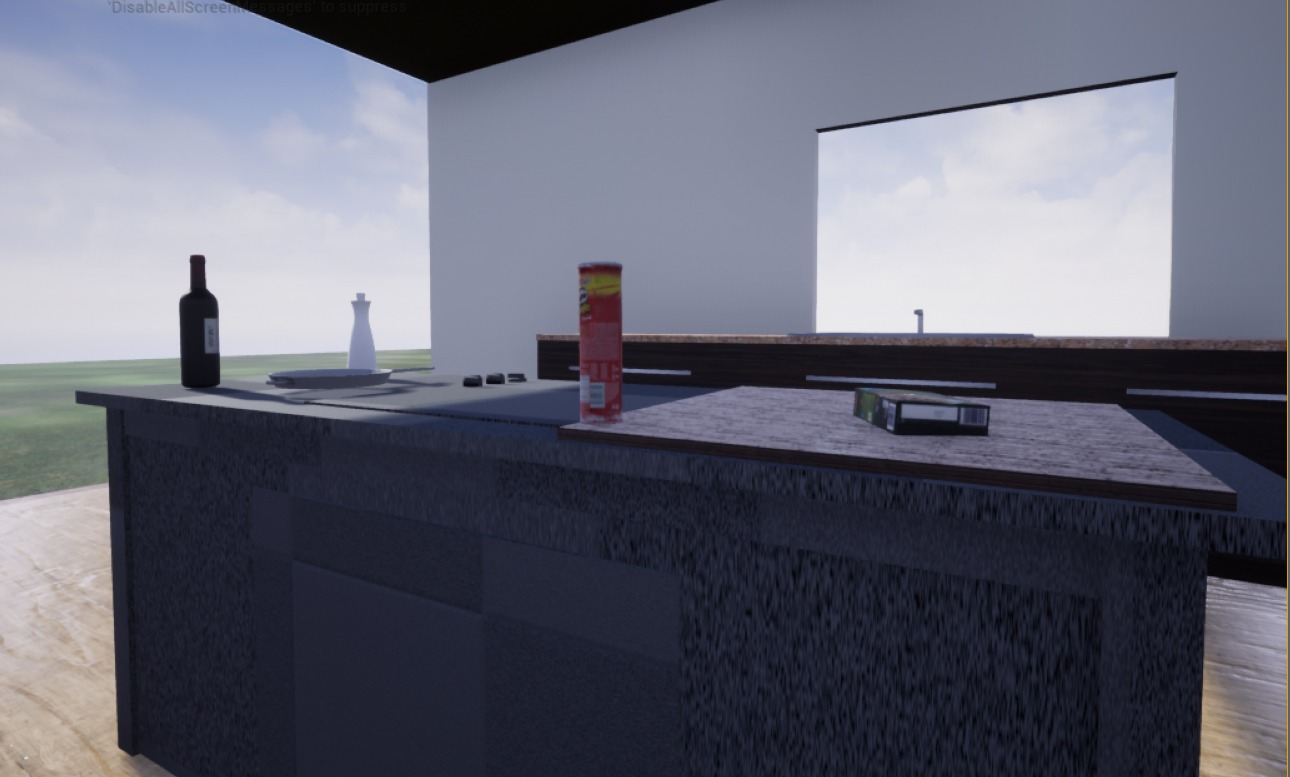
Environment
Equipment
Different equipment’s were used for recording different aspects of the experiment like the study of grasping, movement recording and virtual reality implementation:
-
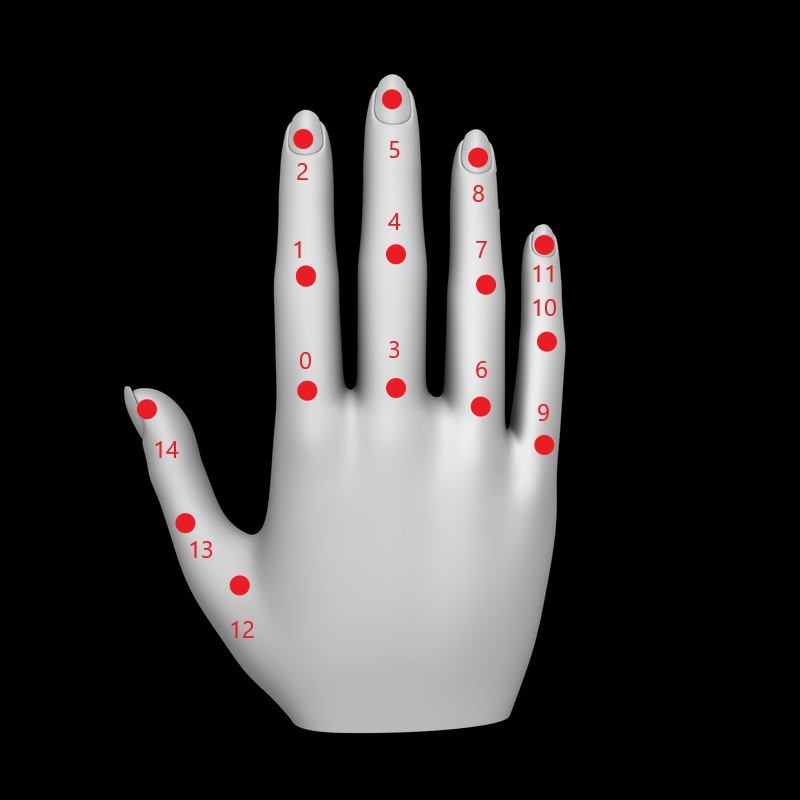
CyberGlove II was used to record all the grasping data which has sensors mapped to all the joints of the finger and recorded the joint angle 3D rotations during grasping.
-
Optitrack physical system detector with 13 Cameras was used to track the physical position of the CyberGlove in both the virtual and the real environment. All this was done on a desktop (dell precision T7500) with intel Xeon, Netgear switch, and MotiveBody 2.0.1 Final software.
-
Unreal Engine application was used to create the virtual environment in which the non-haptic aspect of the experiment was performed
Protocol
The experiment consisted of grasping 3 objects in the virtual environment. In the first part of
the experiment the participants will have to grasp the object directly in the virtual
environment by starting from a fixed origin point, reaching for the object and finally closing
their fingers to grasp it. This was repeated 3 times. For the second part of the experiment the
participants would have to perform the same task but only this time when they are grasping the
object in the virtual world, they are also grasping the physical object in the real world which
has been placed at the exact same position of the object in the virtual environment. All these
tasks were performed 3 times each and then an average of the values was calculated for the
result.
Data from the sensors [7], [8], [12], [13], [14] were ignored for the sake of this experiment as
the sensors of the Glove were not working or were faulty.
Participants
Total of 8 people (4 males and 4 females) participated to the experiments in 2 days. All are students and members of the project with diverse experiences in virtual reality. The age of participants was between 23 and 34, mean age: 28+-6.
Results
The final data suggests that without the haptic feedback the participants were not able to perceive when to close their fingers and how much to close their fingers. The 3D rotation of the joint angles with the haptic feedback is less as compared to the one without the haptic feedback.
| Sensor | X non-haptic | Y non-haptic | Z non-haptic | X haptic | Y haptic | Z haptic |
|---|---|---|---|---|---|---|
| [0] | 18.28025833 | 0 | -39.08489967 | 3.186732 | 0 | -31.94444533 |
| [1] | -15.57761133 | 0 | 0 | 3.186732 | -27.51681633 | 0 |
| [2] | -10.28122333 | 0 | 0 | 3.186732 | -18.161099 | 0 |
| [3] | 22.67656967 | 0 | 0 | 3.186732 | 5.178441333 | 0 |
| [4] | -15.57761133 | 0 | 0 | 3.186732 | -27.51681633 | 0 |
| [5] | -10.28122333 | 0 | 0 | 3.186732 | -18.161099 | 0 |
| [6] | 21.68721 | 0 | 30.357142 | 3.186732 | 3.777735667 | 28.983134 |
| [7] | 0 | 0 | 0 | 3.186732 | -30 | 0 |
| [8] | 0 | 0 | 0 | 3.186732 | -19.80000067 | 0 |
| [9] | -3.904754333 | 0 | 31.380878 | 3.186732 | -8.091217 | 23.85483067 |
| [10] | -59.68831367 | 0 | 0 | 3.186732 | -73.73188267 | 0 |
| [11] | -39.394287 | 0 | 0 | 3.186732 | -48.66304267 | 0 |
| [12] | -10 | 107.4642843 | -30 | 3.186732 | -10 | -30 |
| [13] | -44.448883 | 0 | -42.53571567 | 3.186732 | -33.85416667 | -63.17669167 |
| [14] | -19.94708733 | 0 | 0 | 12.705307 | 0 | 0 |