Aquarium
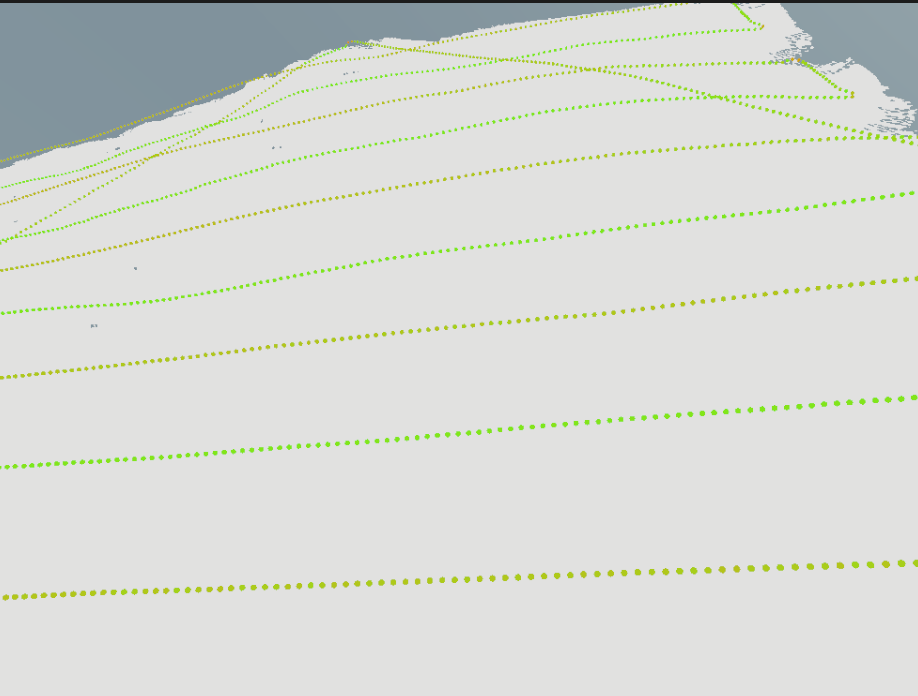
 Travis will run in an simulated environment, specifically the Unreal gaming engine. Because we do not know how large the simulated terrain will be we need to specify a part of the map in which the simulation will take place. The Box in which the simulation takes place is called \textit{aquarium}. Inside the aquarium every point is described with x, y and z values. In the real world our reference system would you the latitude, longitude and depth values to describe an specific point where the AUV has been. In order to calculate the width of the aquarium, we need to consider the bottom-left and the bottom-right point of the data (e.g., the lowest latitude and the highest latitude in the log files and an arbitrary but fixed longitude value) and calculate the metric distance between these points. This is done with the Haversine Formula.
Travis will run in an simulated environment, specifically the Unreal gaming engine. Because we do not know how large the simulated terrain will be we need to specify a part of the map in which the simulation will take place. The Box in which the simulation takes place is called \textit{aquarium}. Inside the aquarium every point is described with x, y and z values. In the real world our reference system would you the latitude, longitude and depth values to describe an specific point where the AUV has been. In order to calculate the width of the aquarium, we need to consider the bottom-left and the bottom-right point of the data (e.g., the lowest latitude and the highest latitude in the log files and an arbitrary but fixed longitude value) and calculate the metric distance between these points. This is done with the Haversine Formula.
If you want to learn more about the Aquarium, you can download the technical paper on this topic.
DOWNLOAD